
You’ll need 10 minutes to implement convolutions with padding in Numpy
Convolutional networks are fun. You saw last week how they improve model performance when compared to vanilla artificial neural networks. But what a convolution actually does to an image? That’s what you’ll learn today.
After reading, you’ll know how to write your convolution function from scratch with Numpy. You’ll apply filters such as blurring, sharpening, and outlining to images, and you’ll also learn the role of padding in convolutional layers.
It’s a lot of work, and we’re doing everything from scratch. Let’s dive in.
Don’t feel like reading? Watch my video instead:
You can download the source code on GitHub.
How Convolutions Work
Convolutional neural networks are a special type of neural network used for image classification. At the heart of any convolutional neural network lies convolution, an operation highly specialized at detecting patterns in images.
Convolutional layers require you to specify the number of filters (kernels). Think of these as a number of pattern detectors. Early convolutional layers detect basic patterns, such as edges, corners, and so on. Specialized patterns are detected at later convolutional layers, such as dog ears or cat paws, depending on the dataset.
A single filter is just a small matrix (usually rectangular). It’s your task to decide on the number of rows and columns, but 3x3 or 5x5 are good starting points. Values inside the filter matrix are initialized randomly. The task of a neural network is to learn the optimal values for the filter matrix, given your specific dataset.
Let’s take a look at a convolution operation in action. We have a 5x5 image and a 3x3 filter. The filter slides (convolves) over every 3x3 set of pixels in the image, and calculates an element-wise multiplication. The multiplication results are then summed:
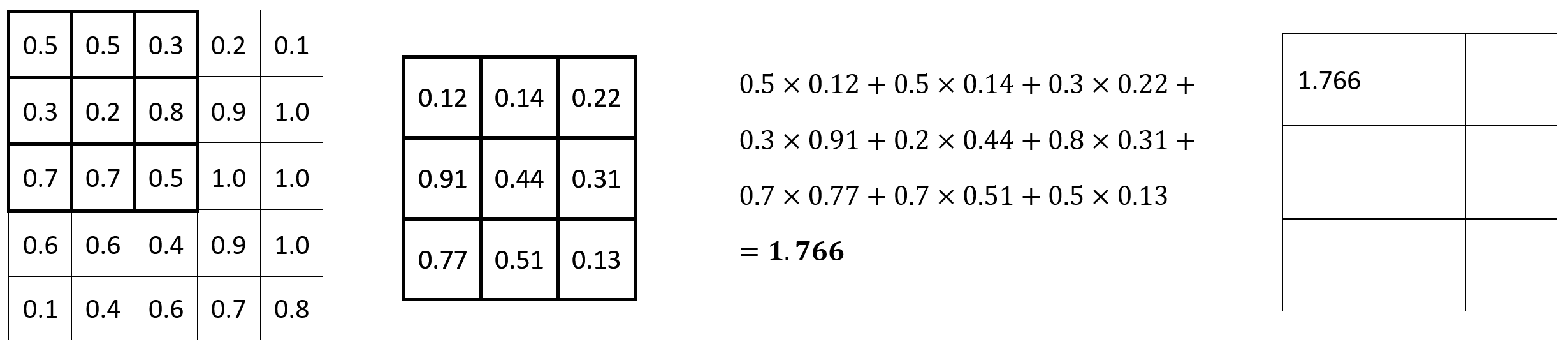
Image 1 — Convolution operation (1) (image by author)
The process is repeated for every set of 3x3 pixels. Here’s the calculation for the following set:
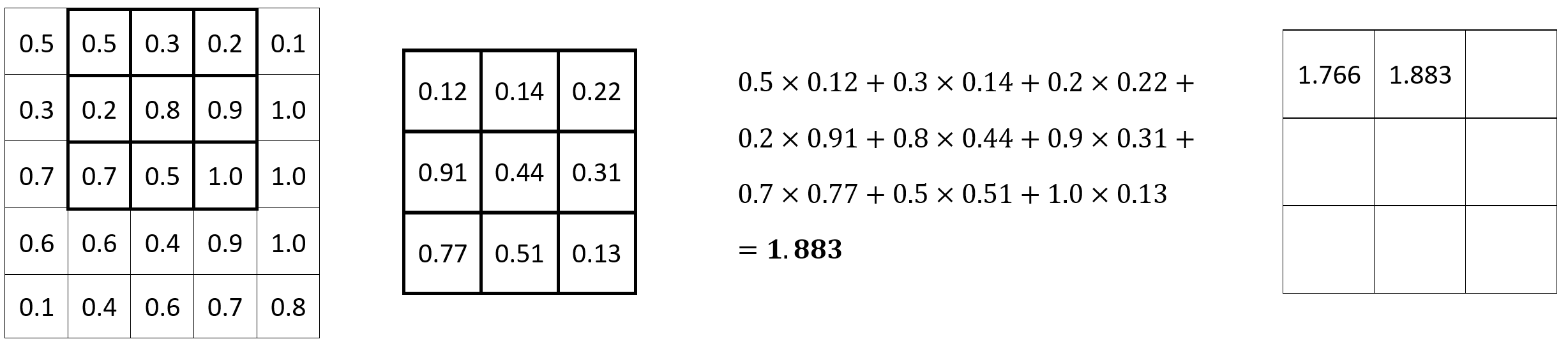
Image 2 — Convolution operation (2) (image by author)
It goes on and on until the final set of 3x3 pixels is reached:
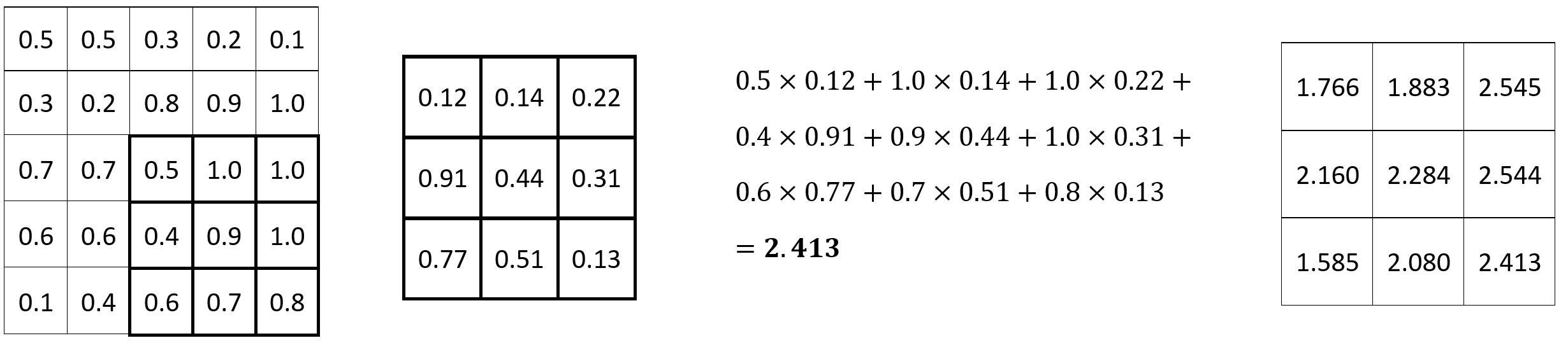
Image 3 — Convolution operation (3) (image by author)
And that’s a convolution in a nutshell! Convolutional layers are useful for finding the optimal filter matrices, but a convolution in itself only applies the filter to the image. There’s a ton of well-known filter matrices for different image operations, such as blurring and sharpening. Let’s see how to work with them next.
Dataset and Image Loading
We’ll use the Dogs vs. Cats dataset from Kaggle for the rest of the article. It’s licensed under the Creative Commons License, which means you can use it for free. One of the previous articles described how to preprocess it, so make sure to copy the code if you want to follow along on identical images.
That’s not a requirement, since you can apply convolution to any image. Seriously, download any image from the web, it will serve you just fine for today.
Let’s get the library imports out of the way. You’ll need Numpy for the math, and PIL and Matplotlib to display images:
import numpy as np
from PIL import Image, ImageOps
import matplotlib.pyplot as plt
From here, let’s also declare two functions for displaying images. The first one plots a single image, and the second one plots two of them side by side (1 row, 2 columns):
def plot_image(img: np.array):
plt.figure(figsize=(6, 6))
plt.imshow(img, cmap='gray');
def plot_two_images(img1: np.array, img2: np.array):
_, ax = plt.subplots(1, 2, figsize=(12, 6))
ax[0].imshow(img1, cmap='gray')
ax[1].imshow(img2, cmap='gray');
You can now load and display an image. For simplicity, we’ll grayscale it and resize it to 224x224. None of these transformations are mandatory, but they make our job a bit easier, as there’s only one color channel to apply convolution to:
img = Image.open('data/train/cat/1.jpg')
img = ImageOps.grayscale(img)
img = img.resize(size=(224, 224))
plot_image(img=img)
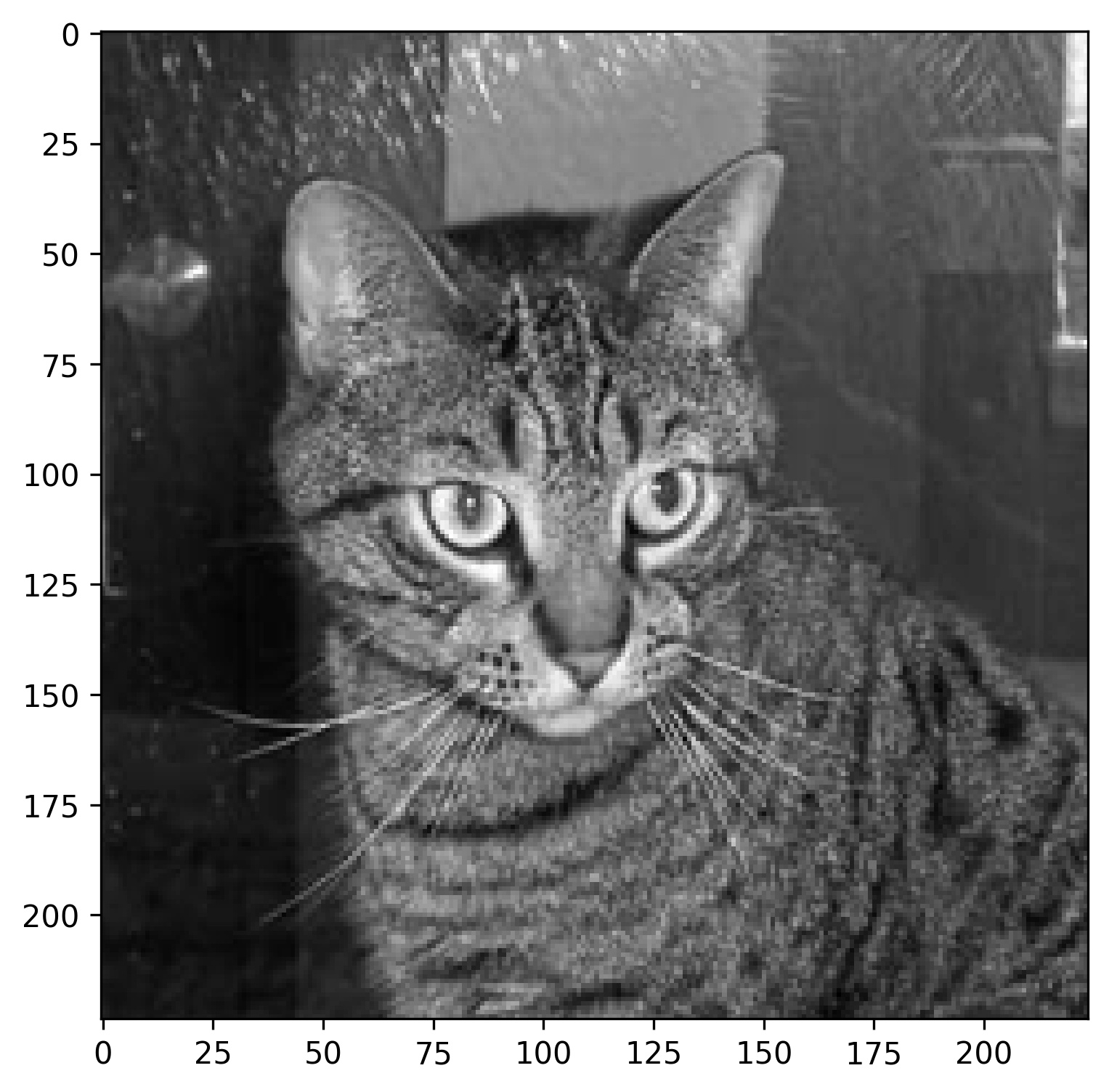
Image 4 — Random cat image from the training set (image by author)
And that takes care of the boring stuff. We’ll apply all convolutional filters to the image above. But first, let’s declare a couple of filter matrices.
Declare Filters for Convolutions
The task of a convolutional layer in a neural network is to find N filters that best extract features from the images. Did you know there are known filters for doing different image operations?
Well, there are — such as a filter for sharpening, blurring, and outlining. I’ve copied the filter matrix values from the setosa.io website, and I strongly recommend you to check it out for a deeper dive.
Anyhow, all mentioned filters are nothing but 3x3 matrices. Copy the following code to store them to variables:
sharpen = np.array([
[0, -1, 0],
[-1, 5, -1],
[0, -1, 0]
])
blur = np.array([
[0.0625, 0.125, 0.0625],
[0.125, 0.25, 0.125],
[0.0625, 0.125, 0.0625]
])
outline = np.array([
[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1]
])
Simple, right? That’s all there is to individual filters. Let’s write a convolution from scratch next and apply these to our image.
Implement Convolution From Scratch
Applying a convolution to an image will make it smaller (assuming no padding). How much smaller depends on the filter size. All of ours are 3x3, but you can go larger.
Sliding, or convolving a 3x3 filter over images means we’ll lose a single pixel on all sides (2 in total). For example, sliding a 3x3 filter over a 224x224 image results in a 222x222 image. Likewise, sliding a 5x5 filter over the same image results in a 220x220 image.
We’ll declare a helper function to calculate the image size after applying the convolution. It’s nothing fancy, but will make our lives a bit easier. It basically calculates how many windows of the filter size you can fit to an image (assuming square image):
def calculate_target_size(img_size: int, kernel_size: int) -> int:
num_pixels = 0
# From 0 up to img size (if img size = 224, then up to 223)
for i in range(img_size):
# Add the kernel size (let's say 3) to the current i
added = i + kernel_size
# It must be lower than the image size
if added <= img_size:
# Increment if so
num_pixels += 1
return num_pixels
Here’s a result from a couple of tests:
- Image size: 224, filter size: 3
- Image size: 224, filter size: 5
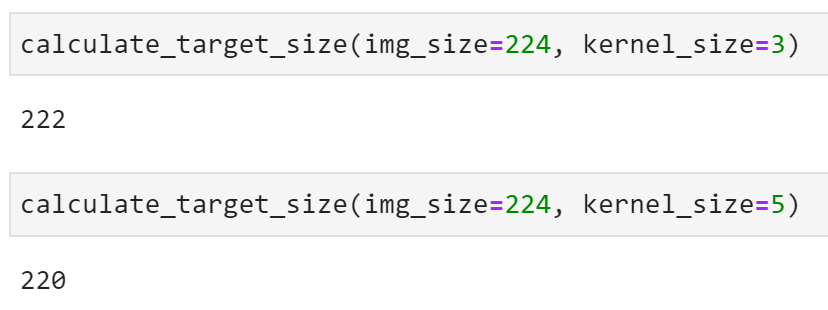
Image 5 — Calculating target image size with different filter sizes (image by author)
Works as advertised. Let’s work on a convolution function next. Here’s what a 3x3 filter does to a single 3x3 image subset:
- Extracts it to a separate matrix
- Does an element-wise multiplication between the image subset and the filter
- Sums the results
Here’s an implementation in code for a single 3x3 pixel subset:
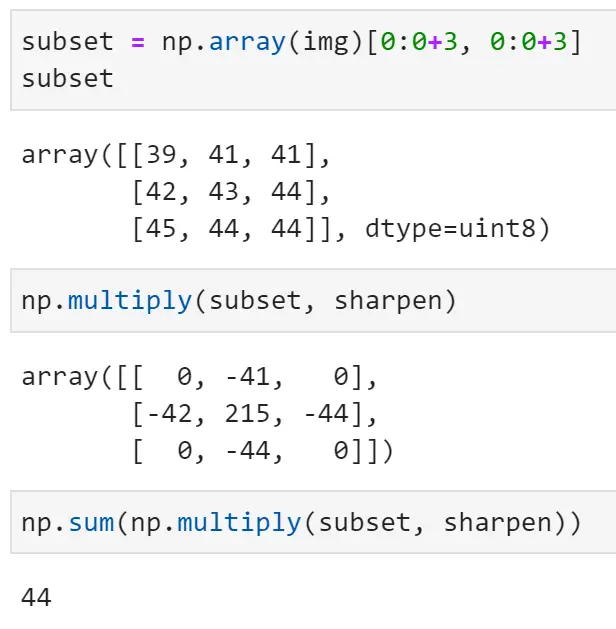
Image 6 — Convolution on a single 3x3 image subset (image by author)
That was easy, but how can you apply the logic to an entire image? Well, easily. The convolve() function calculates the target size and creates a matrix of zeros with that shape, iterates over all rows and columns of the image matrix, subsets it, and applies the convolution. Sounds like a lot when put in a single sentence, but the code shouldn’t give you too much headache:
def convolve(img: np.array, kernel: np.array) -> np.array:
# Assuming a rectangular image
tgt_size = calculate_target_size(
img_size=img.shape[0],
kernel_size=kernel.shape[0]
)
# To simplify things
k = kernel.shape[0]
# 2D array of zeros
convolved_img = np.zeros(shape=(tgt_size, tgt_size))
# Iterate over the rows
for i in range(tgt_size):
# Iterate over the columns
for j in range(tgt_size):
# img[i, j] = individual pixel value
# Get the current matrix
mat = img[i:i+k, j:j+k]
# Apply the convolution - element-wise multiplication and summation of the result
# Store the result to i-th row and j-th column of our convolved_img array
convolved_img[i, j] = np.sum(np.multiply(mat, kernel))
return convolved_img
Let’s test the thing. The following snippet applies the sharpening filter to our image:
img_sharpened = convolve(img=np.array(img), kernel=sharpen)
img_sharpened
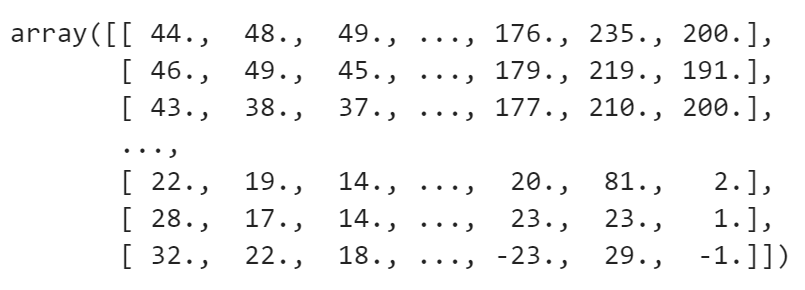
Image 7 — Sharpened image in a matrix representation (image by author)
You can use the plot_two_images() function to visualize our cat image before and after the transformation:
plot_two_images(
img1=img,
img2=img_sharpened
)
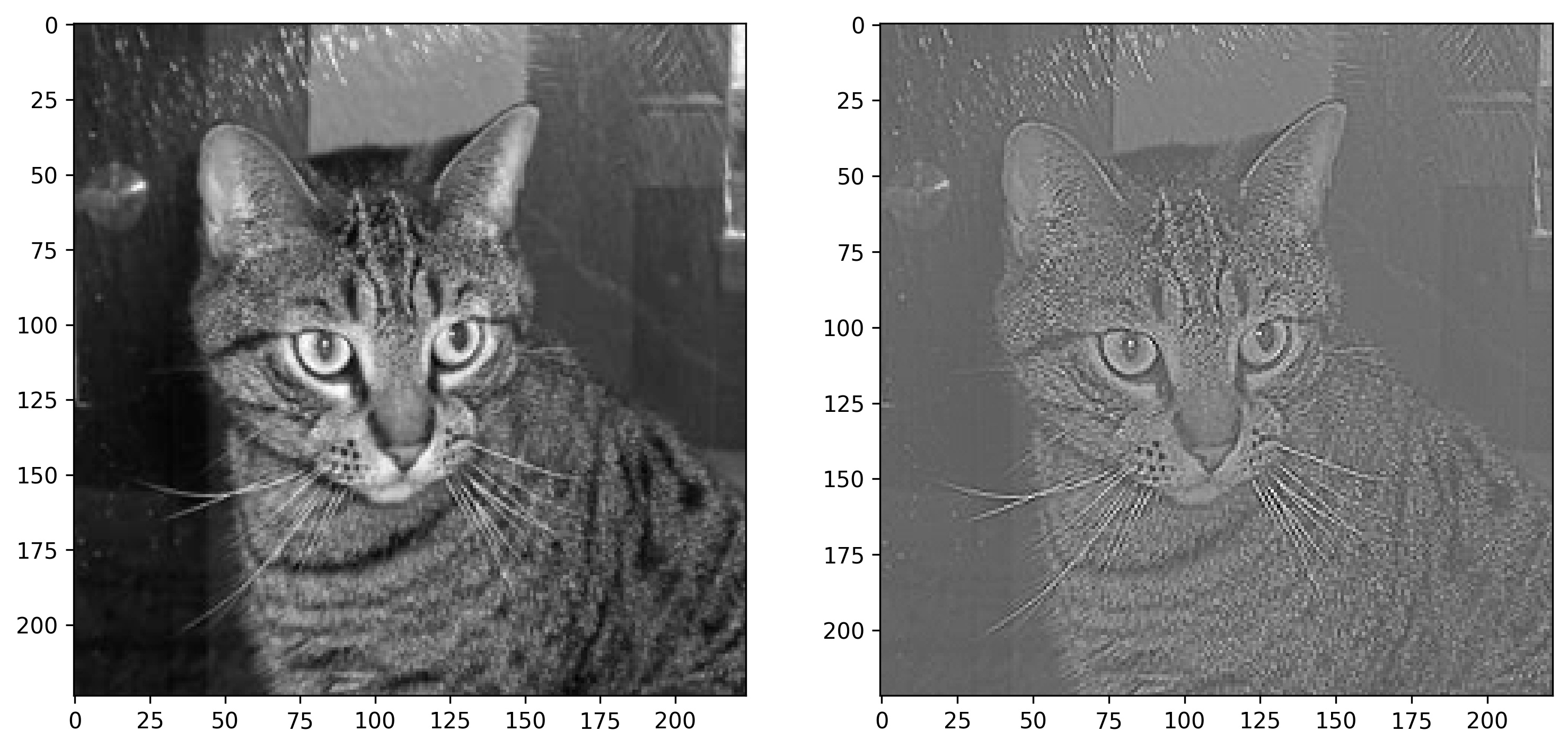
Image 8 — Cat image before and after sharpening (image by author)
The colors are a bit off since values in the right image don’t range between 0 and 255. It’s not a big issue, but you can “fix” it by replacing all negative values with zeros:
def negative_to_zero(img: np.array) -> np.array:
img = img.copy()
img[img < 0] = 0
return img
plot_two_images(
img1=img,
img2=negative_to_zero(img=img_sharpened)
)
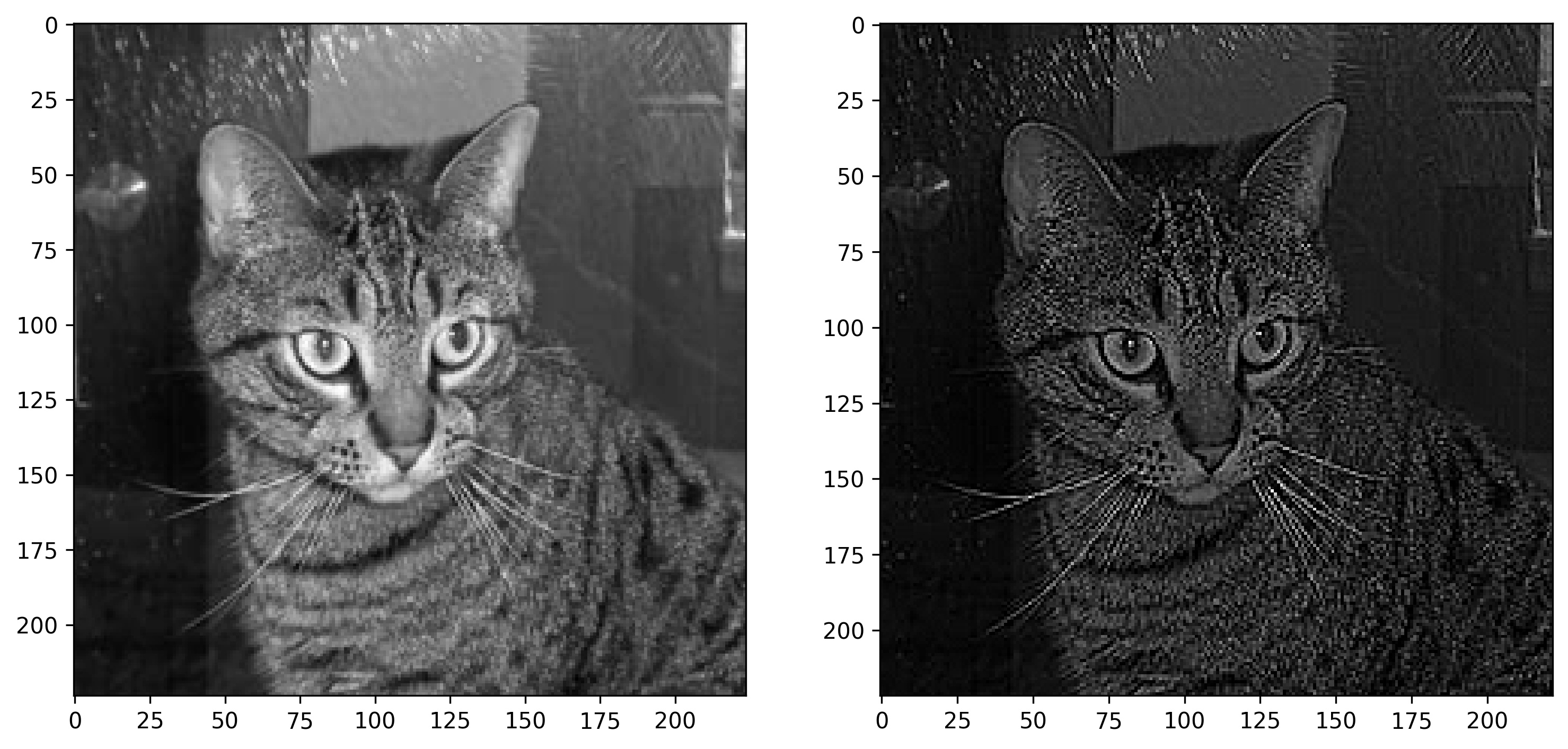
Image 9 — Cat image before and after sharpening (2) (image by author)
The image on the right definitely looks sharpened, no arguing there. Let’s see what blurring does next:
img_blurred = convolve(img=np.array(img), kernel=blur)
plot_two_images(
img1=img,
img2=img_blurred
)
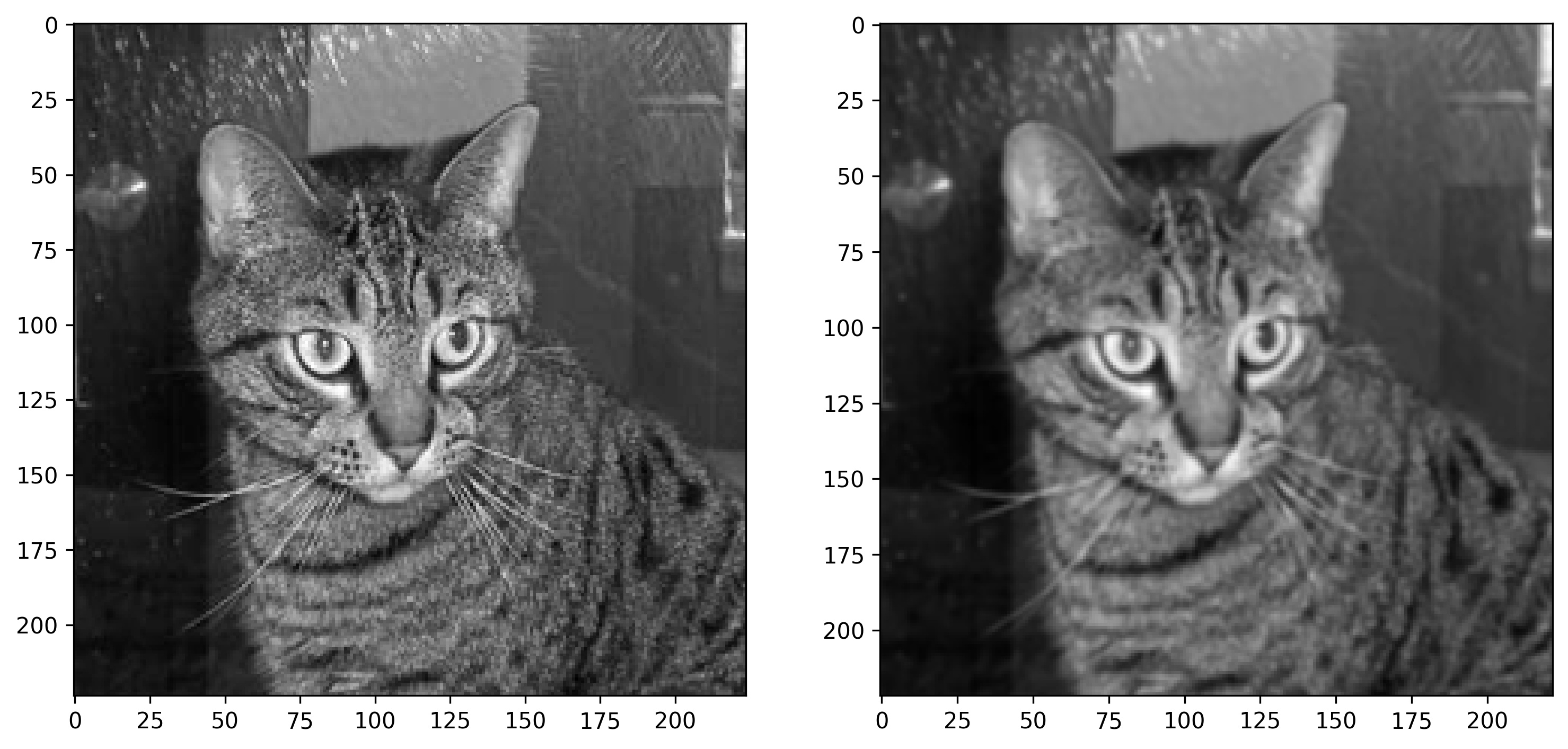
Image 10 — Cat image before and after blurring (image by author)
The blurring filter matrix doesn’t have negative values, so the coloring is identical. Once again, there’s no debate — the blurring filter worked as advertised.
Finally, let’s see what the outline filter will do to our image:
img_outlined = convolve(img=np.array(img), kernel=outline)
plot_two_images(
img1=img,
img2=img_outlined
)
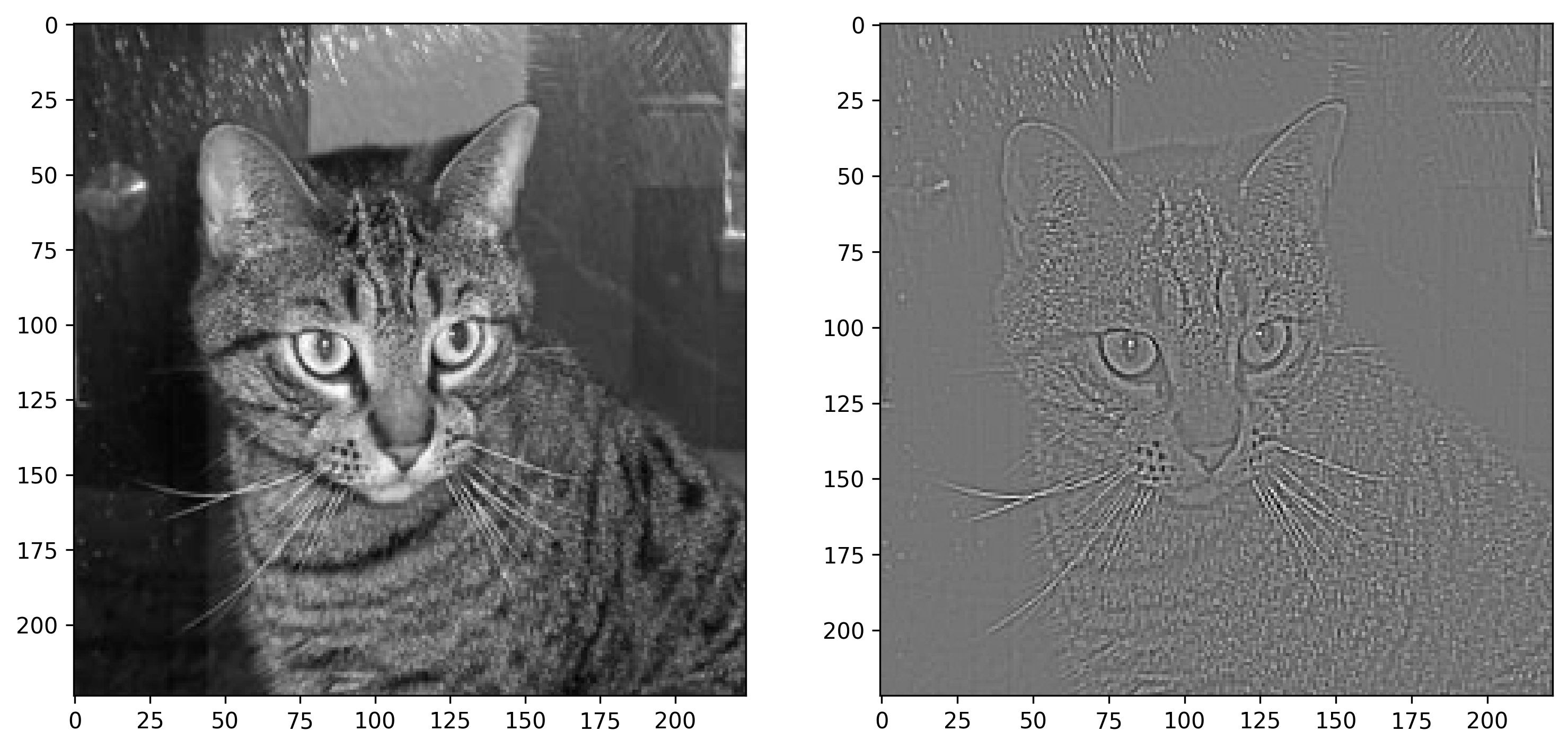
Image 11 — Cat image before and after outlining (image by author)
It also suffers from the coloring problem, as values in the matrix are mostly negative. Use negative_to_zero() to get a clearer idea:
plot_two_images(
img1=img,
img2=negative_to_zero(img=img_outlined)
)
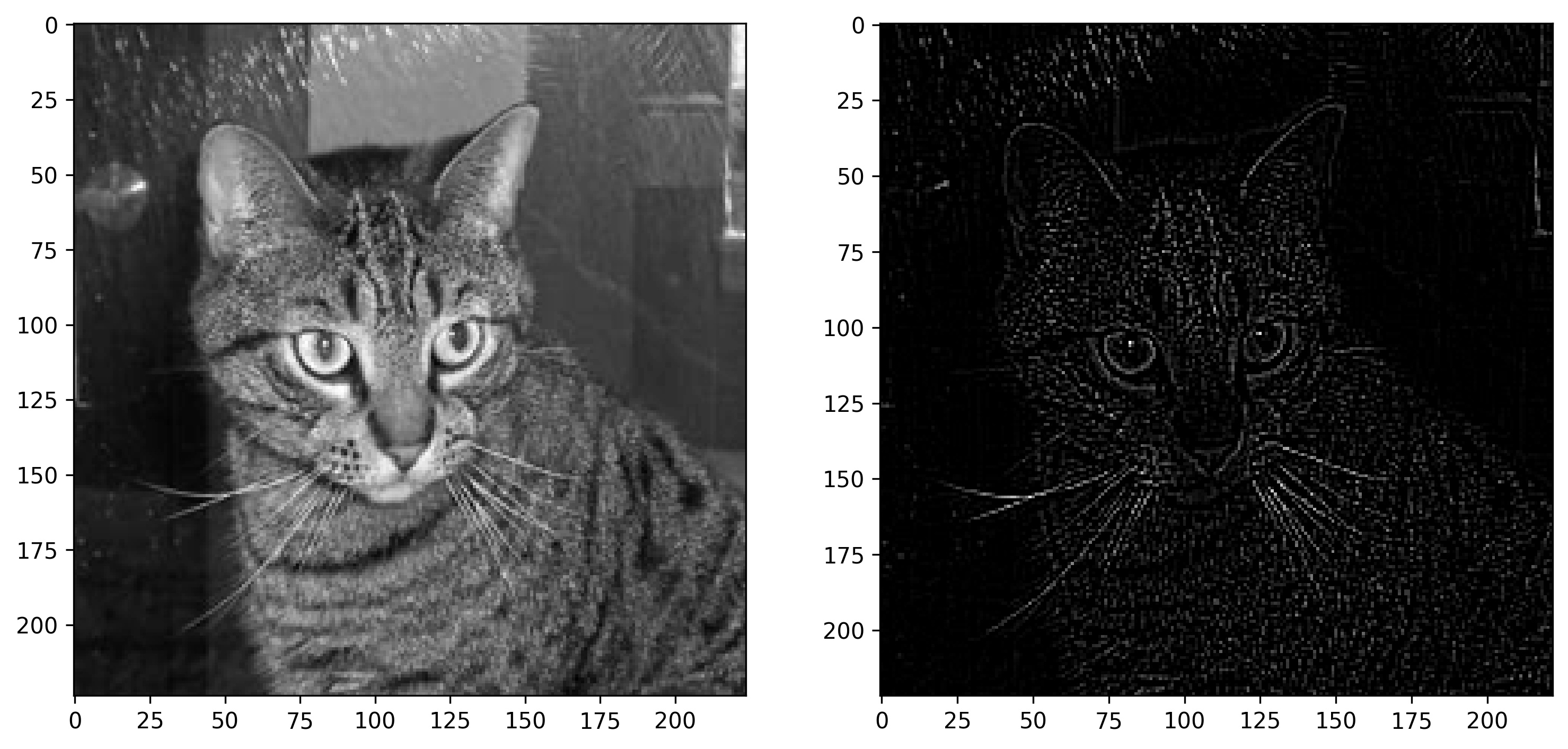
Image 12- Cat image before and after outlining (2) (image by author)
You know what the only problem is? The convolved images are of shape 222x222 pixels. What if you want to keep the original size of 224x224 pixels? That’s where padding comes into play.
Implement Convolution with Padding From Scratch
TensorFlow’s Conv2D layer lets you specify either valid or same for the padding parameter. The first one (default) adds no padding before applying the convolution operation. It’s basically what we’ve covered in the previous section.
The second one adds padding depending on the filter size, so the source and convolved images are of the same shape.
Padding is essentially a “black” border around the image. It’s black because the values are zeros, and zeros represent the color black. The black borders don’t have any side effects on the calculations, as it’s just a multiplication with zero.
Let’s get an intuitive understanding of the concept before writing any code. The following image shows you what happens to image X as the filter K is applied to it. Basically, it goes from 5x5 to 3x3 (Y):
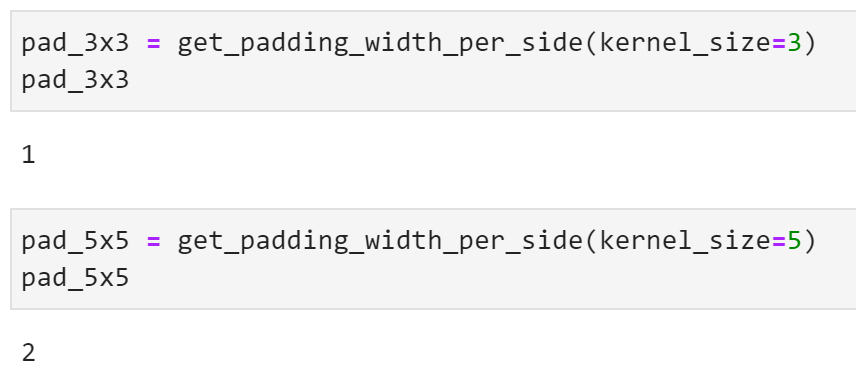
Image 13 — Applying convolution to an image without padding (image by author)
Adding a pixel-wide padding results in an input image (X) of 7x7 pixels, and the resulting image (Y) of 5x5 pixels:
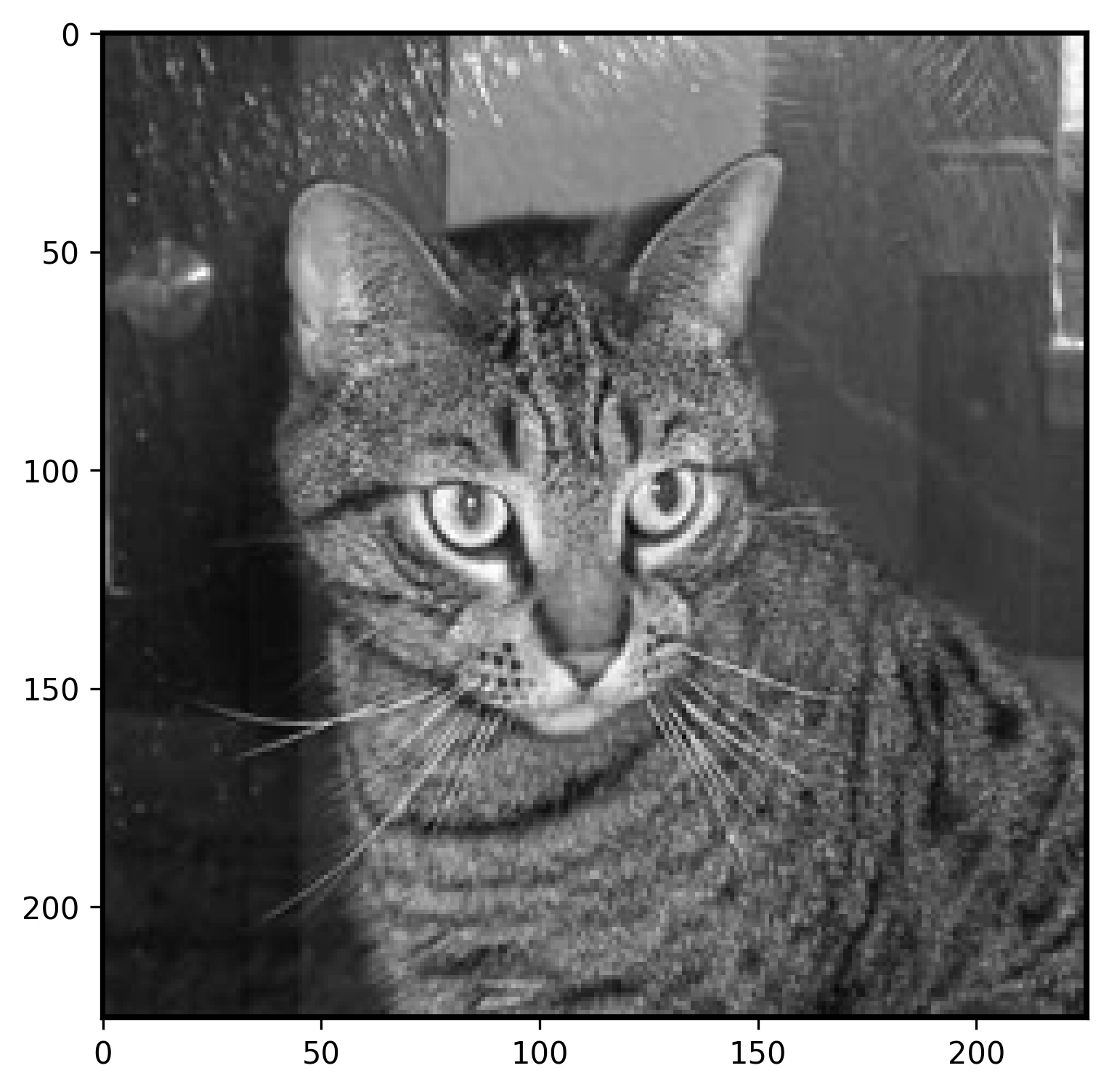
Image 14 — Applying convolution to an image with padding (image by author)
The Y in the second image has the same number of pixels as X in the first image, which is exactly what we want. Convolution operation has to take some pixels from the image, and it’s better for these to be zeros.
In the real world, pixels on the edges usually don’t contain significant patterns, so losing them isn’t the worst thing in the world.
Onto the code now. First things first, let’s declare a function that returns the number of pixels we need to pad the image with on a single side, depending on the kernel size. It’s just an integer division with 2:
def get_padding_width_per_side(kernel_size: int) -> int:
# Simple integer division
return kernel_size // 2
Here are a couple of examples for kernel sizes 3 and 5:
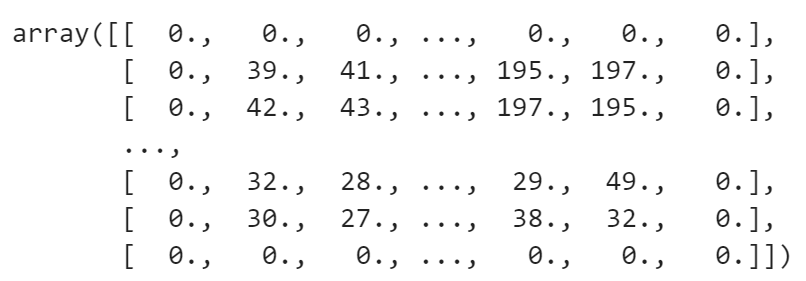
Image 15 — Calculating padding for different kernel sizes (image by author)
There isn’t much to it. We’ll now write a function that adds padding to the image. First, the function declares a matrix of zeros with a shape of image.shape + padding * 2. We’re multiplying the padding with 2 because we need it on all sides. The function then indexes the matrix so the padding is ignored and changes the zeros with the actual image values:
def add_padding_to_image(img: np.array, padding_width: int) -> np.array:
# Array of zeros of shape (img + padding_width)
img_with_padding = np.zeros(shape=(
img.shape[0] + padding_width * 2, # Multiply with two because we need padding on all sides
img.shape[1] + padding_width * 2
))
# Change the inner elements
# For example, if img.shape = (224, 224), and img_with_padding.shape = (226, 226)
# keep the pixel wide padding on all sides, but change the other values to be the same as img
img_with_padding[padding_width:-padding_width, padding_width:-padding_width] = img
return img_with_padding
Let’s test it by adding a padding to the image for a 3x3 filter:
img_with_padding_3x3 = add_padding_to_image(
img=np.array(img),
padding_width=pad_3x3
)
print(img_with_padding_3x3.shape)
plot_image(img_with_padding_3x3)
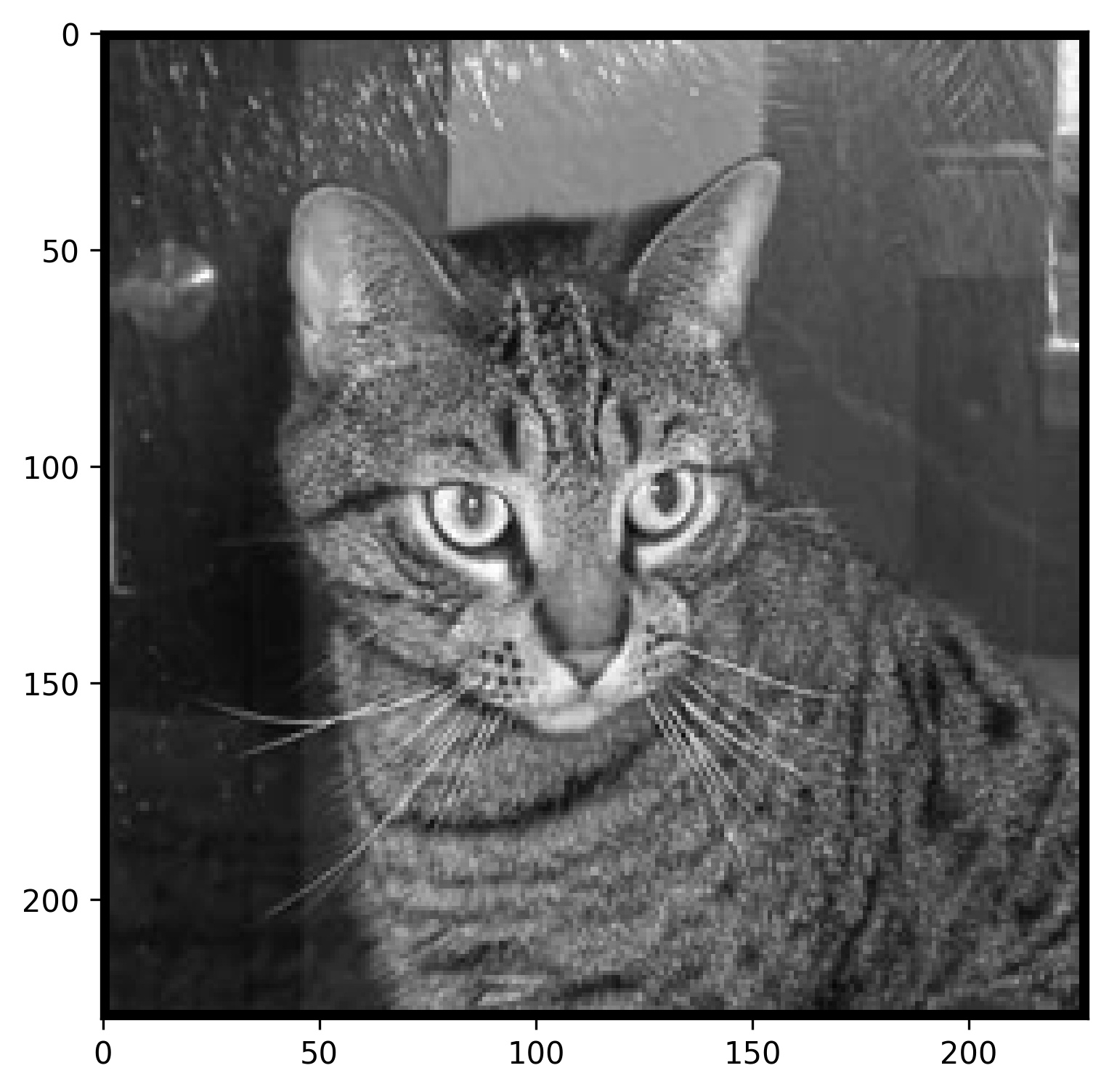
Image 16 — Image with a pixel-wide padding (image by author)
You can see the black border if you zoom in close enough. If you’re wondering, this image has a shape of 226x226 pixels. Here’s how it looks like when displayed as a matrix:
img_with_padding_3x3
Image 17 — Single-pixel padded image as a matrix (image by author)
You can see the original image surrounded with zeros, which is what we wanted. Let’s see if the same holds true for the 5x5 kernel:
img_with_padding_5x5 = add_padding_to_image(
img=np.array(img),
padding_width=pad_5x5
)
print(img_with_padding_5x5.shape)
plot_image(img_with_padding_5x5)
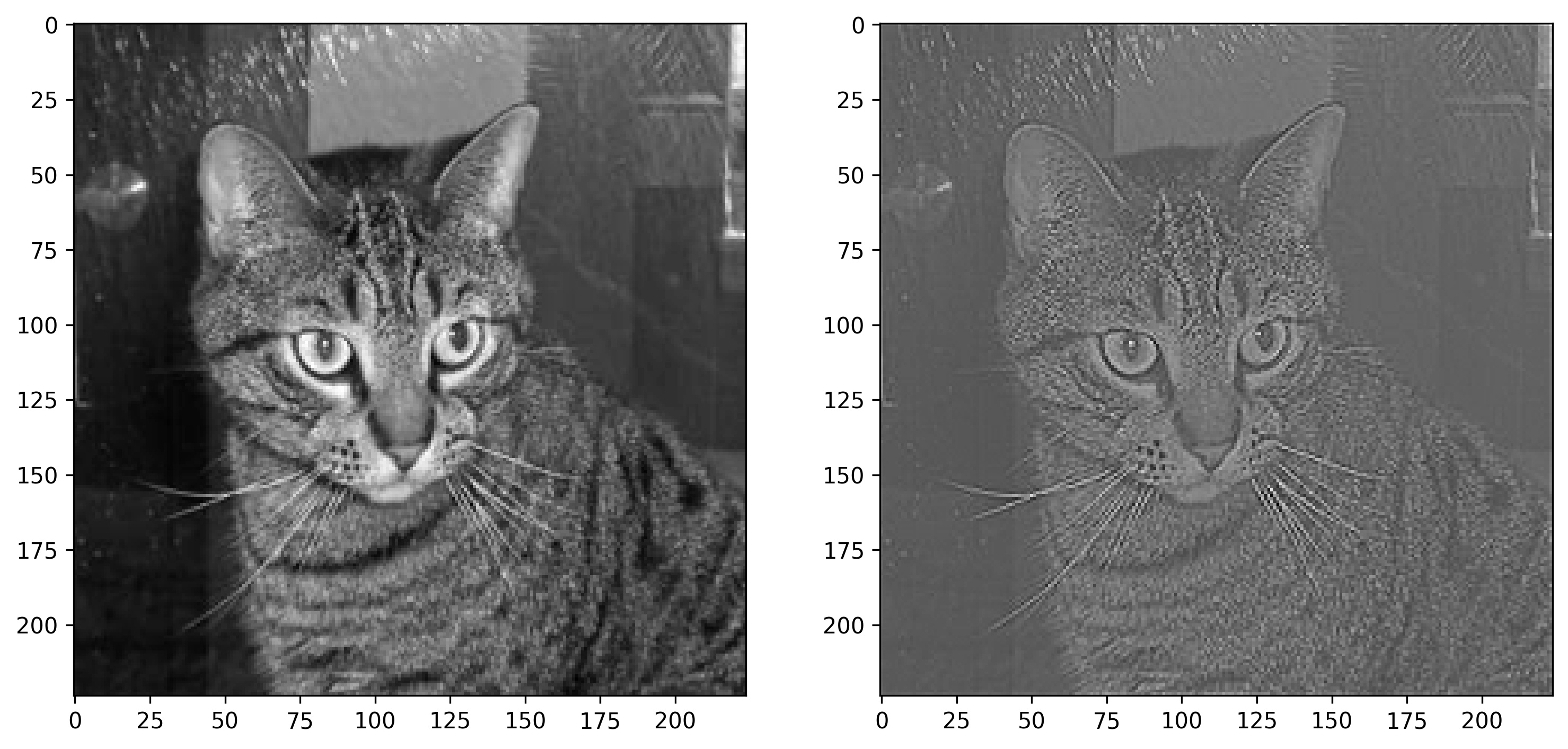
Image 18 — Image with a two-pixel-wide padding (image by author)
Now you can definitely see the black border on this 228x228 image. Let’s see how it looks when printed as a matrix:
img_with_padding_5x5
Image 19 — Two-pixel padded image as a matrix (image by author)
It looks how it should — two pixel padding on all sides. Let’s apply a sharpening filter to our single-pixel-padded image to see if there are any issues:
img_padded_3x3_sharpened = convolve(img=img_with_padding_3x3, kernel=sharpen)
print(img_padded_3x3_sharpened.shape)
plot_two_images(
img1=img,
img2=img_padded_3x3_sharpened
)
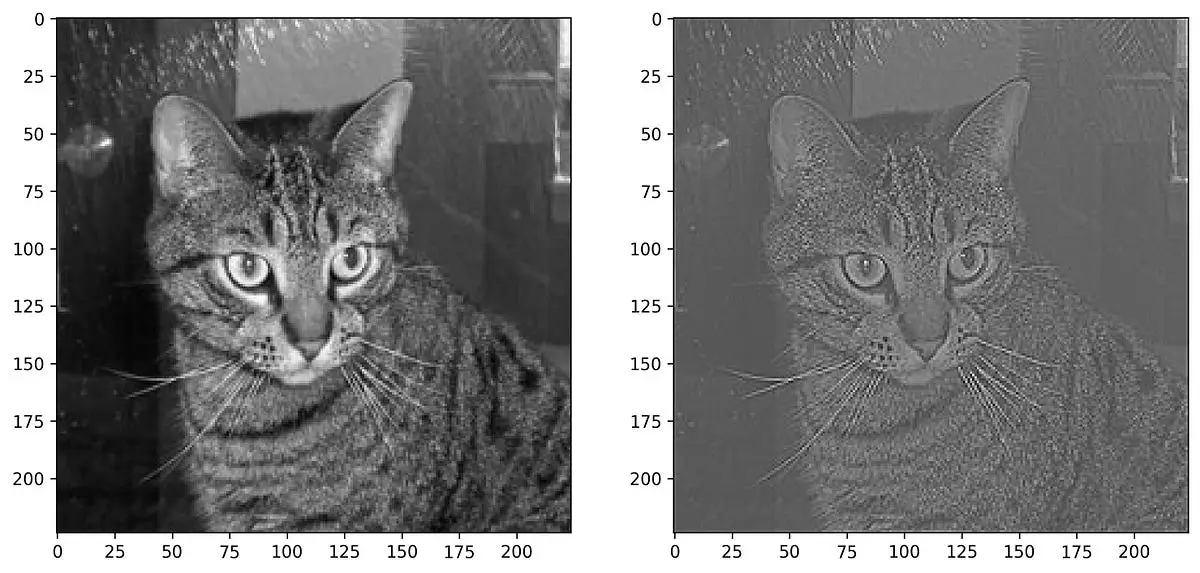
Image 20 — Padded image before and after applying the sharpening filter (image by author)
Works without any issues. The convolved image has a shape of 224x224 pixels, which is exactly what we wanted.
And that’s convolutions and padding in a nutshell. We covered a lot today, so let’s make a short recap next.
Conclusion
Convolutions are easier than they sound. The whole thing boils down to sliding a filter across an entire image. If you drop all the matrix terminology, it simplifies to elementary school math — multiplication and addition. There’s nothing fancy going on.
We could complicate things further by introducing strides— but these are common to both convolutions and pooling. I’ll leave them for the following article, which covers pooling — a downsizing operation that commonly follows a convolutional layer.
Stay tuned for that one. I’ll release it in the first half of the next week.
Stay connected
- Sign up for my newsletter
- Subscribe on YouTube
- Connect on LinkedIn